Chemical Reaction Neural Network (CRNN)
crnn.RmdModel Type
CRNNs, are a specific category of ordinary differential equations (ODEs). The ODE is constrained in such a way that the right hand side (vector field) function must map to a Neural Network (NN), but the network structure remains general enough to encode many systems by changing the parameters, without re-building the model.
The output of the CRNN is the right hand side function:
\[ \dot x(t) = \text{CRNN}(t,x,p)\,, \]
where \(p\) includes the kinetic rate coefficients, the stoichiometry and information about catalytic modifiers (reactants that are not consumed by the reaction).
Example
We want to simulate these two reactions:
A + B <=> C
D <=> ØConventional Approach (simplified)
The simple way to simulate exactly this model is to create a flux \(v\) from the law of MASS action:
\[ v(x,k) = \begin{pmatrix} k_{1,\text{f}} [A] [B] - k_{1,\text{r}} [C]\\ k_{2,\text{f}} [D] - k_{2,\text{r}} \end{pmatrix} \]
Where the \(k\) are kinetic rate coefficients, and \([A]\) means concentration of compound A (this is a typical convention in systems biology).
The stoichiometry of this system is:
\[ \nu = \begin{pmatrix} -1 & 0\\ -1 & 0\\ 1 & 0\\ 0 & -1 \end{pmatrix} \]
Finally, the system is:
\[ \dot x = \nu \cdot v(t,x,k) \]
In R, this becomes:
nu <- matrix(
c(
-1,-1,1,0,# reaction 1
0,0,0,-1 # reaction 2
),
4,2,
dimnames=list(
c("A","B","C","D"),
c("A+B<=>C","D->0")
)
)
print(nu)
#> A+B<=>C D->0
#> A -1 0
#> B -1 0
#> C 1 0
#> D 0 -1Next we set the kinetic rate coefficients, but in logarithmic space
l = log(k), we set them as a matrix, with the first column
containing all forward coefficients \(k_{\text{f}}\), and the second column all
reverse rates \(k_{\text{r}}\)
m <- matrix(0,4,2) # we have no modifiers
l <- matrix( # log(k)
c(
-1,-1, # forward
-2,-30 # backward
),
2,2, # two reactions, fwd+bwd
dimnames=list(c("A+B<=>C","D<=>0"),c("fwd","bwd"))
)
print(l)
#> fwd bwd
#> A+B<=>C -1 -2
#> D<=>0 -1 -30
## initial values:
iv <- c(A=2.1,B=1.1,C=0.1,D=3.0)
## we collect all parameters into a list:
par <- list(l=l,nu=nu,m=m)Here, we made the second reaction almost irreversible:
k[2,'bwd'] = exp(-30) # ~1e-13Next, we define the vector field and Jacobian (the ODE):
## kinetic laws hard-coded into vf
manual_vf <- function(t,y,par){
k <- exp(par$l)
flux <- c(
k[1,'fwd']*y['A']*y['B'] - k[1,'bwd']*y['C'],
k[2,'fwd']*y['D']-k[2,'bwd']
)
return(as.vector(par$nu %*% flux))
} # changing nu may make this function wrong
manual_jac <- function(t,y,par){
k <- exp(par$l)
dflux_dy <- matrix(
c(
k[1,'fwd']*y['B'], # dflux[1]/dA
k[1,'bwd']*y['A'], # dflux[1]/dB
-k[1,2], # dflux[1]/dC
0, # dflux[1]/dD
0,
0, # [...]
0,
k[2,'fwd'] # dflux[2]/dD
),
2, 4,
byrow=TRUE
)
J <- par$nu %*% dflux_dy
return(J)
}These two functions are not very general, any changes to \(\nu\) must be considered in the flux expressions. These functions hard-code the model’s structure at least partially.
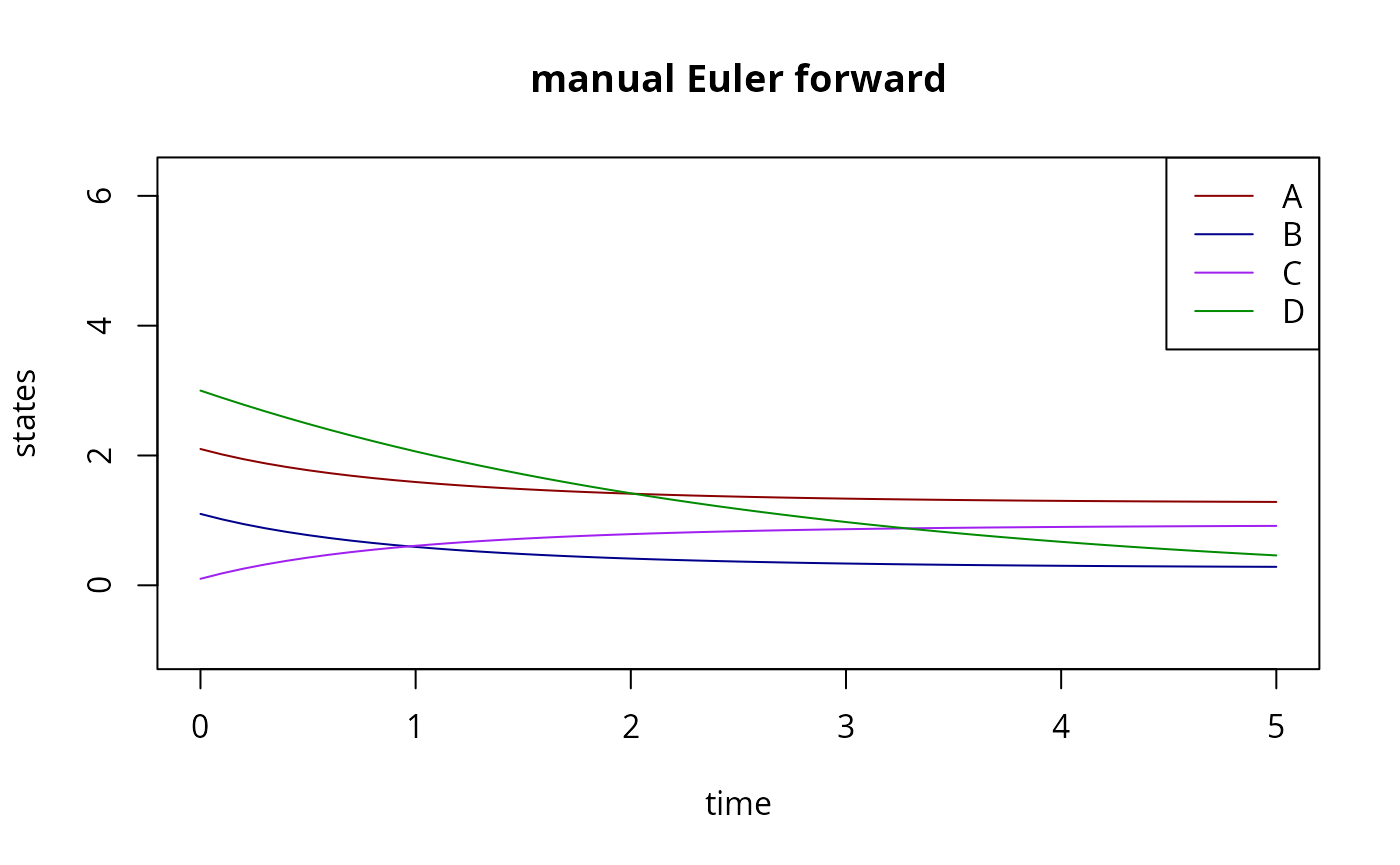
We could use manual_vf and manual_jac with
deSolve (with modifications), but since it is a very small
system we can obtain a fairly good solution with Euler forward steps
(ignoring the Jacobian entirely):
y <- iv # initialize
dt <- 0.1 # time step
tm <- seq(0,5,by=dt)
Y <- matrix(NA,length(y),length(tm))
for (j in seq_along(tm)){
Y[,j] <- y
f <- manual_vf(tm[j],y,par)
y <- y+f*dt
}
matplot(
tm,
t(Y),
type="l",
xlab="time",
ylab="states",
lty=1,
col=c("red4","blue4","purple","green4"),
ylim=c(-1,sum(iv)),
main="manual Euler forward"
)
legend(
"topright",
legend=LETTERS[seq(4)],
lty=1,
col=c("red4","blue4","purple","green4")
)
CRNN Variant
The same system can be written as a CRNN, more generally:
numReactions <- 2 # this has to be manually set
f <- c(LogSum="log(A+B+C+D)") # an arbitrary output function
C <- CRNN(numReactions,iv,f) # C code
c.file <- tempfile(pattern="CRNN",fileext=".c")
cat(C,sep="\n",file=c.file) # write code to file
so.file <- shlib(c.file) # compile the codeNext we define the simulation experiment:
The uqsa package provides a function that returns a
closure around the model and experiment, similar to conventional ODEs.
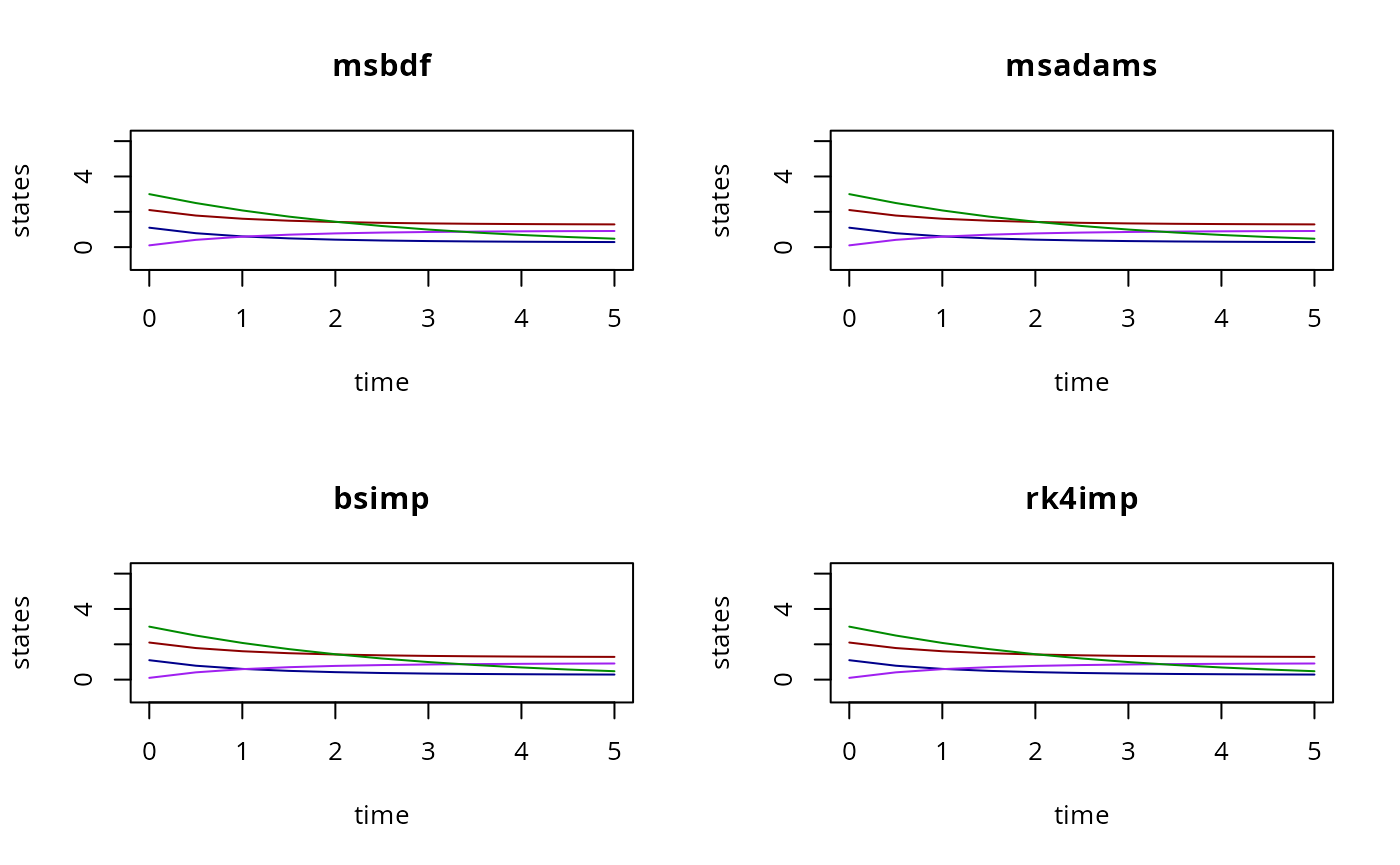
But, in this case, we want to be able to switch between different
integration methods, so we use the solver more explicitly:
par(mfrow=c(4,2))
for (M in seq(0,7)){
y <- gsl_odeiv2_CRNN(
so.file,
experiments=ex,
l=l,
nu=nu,
m=m,
method=M
)
matplot(
ex[[1]]$outputTimes,
t(y[[1]]$state[,,1]),
type="l",
xlab="time",
ylab="states",
lty=1,
col=c("red4","blue4","purple","green4"),
ylim=c(-1,sum(iv)),
main=name_method(M)
)
}
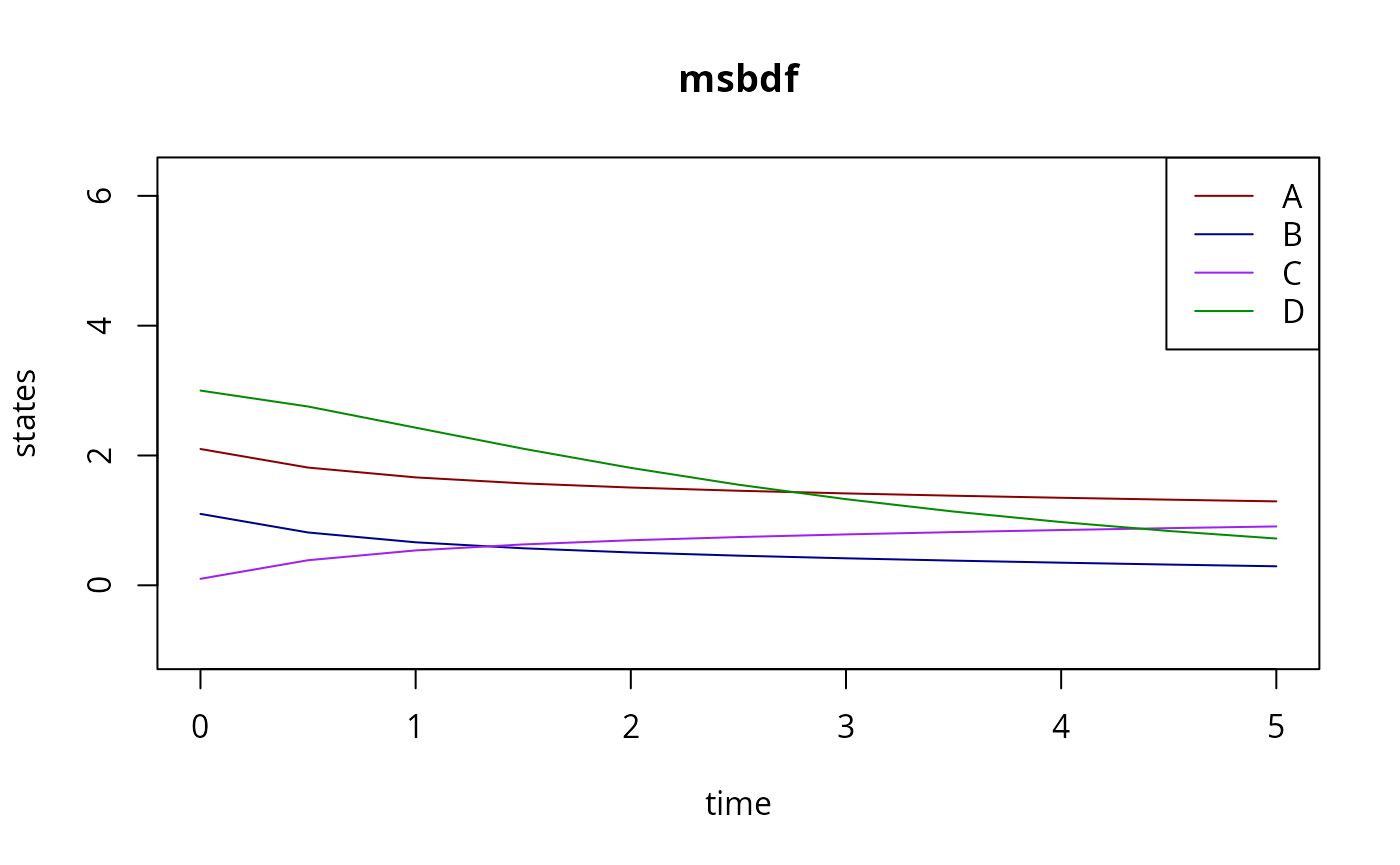
MCMC and repeated Calls to the solver
In an MCMC context, we typically don’t want to switch between methods, so we would create a closure:
modelName <- "CRNN"
comment(modelName) <- so.file
# A B and C interact with one another
s <- scrnn(ex,modelName) # s encloses ex, and model
y_ABC_D <- s(par) # s is a function of only 'par'
matplot(
ex[[1]]$outputTimes,
t(y_ABC_D[[1]]$state[,,1]),
type="l",
xlab="time",
ylab="state variables",
lty=1,
col=c("red4","blue4","purple","green4"),
ylim=c(-1,sum(iv)),
main=name_method(0)
)
Here, s(par) can be called repeatedly, with various
par, without re-stating which experiments to simulate or
which model to use. But, crucially, changing par$nu will be
handled correctly by the CRNN, the flux and Jacobian will change
accordingly.
Changed Reaction System
The code C we generated for two reactions and four state
variables is general enough to depict every system that has two MASS
action reactions and four reacting compounds. We can easily change it
to:
## now, A+B also create D
par$nu <- matrix(
c(
-1,-1,1,1, # A + B <=> D + C
0,0,0,-1 # D <=> Ø
),
4,2,
dimnames=list(c("A","B","C","D"),c("A+B<=>C+D","D->0"))
)Now, this is just a parameter change. We simulate without generating any new code:
y_ABCD_ <- s(par) # A,B,C,&D all interact now
par(mfrow=c(2,1), family="Fira Code")
matplot(
ex[[1]]$outputTimes,
t(y_ABCD_[[1]]$state[,,1]),
type="l",
xlab="time",
ylab="state variables",
lty=1,
col=c("red4","blue4","purple","green4"),
ylim=c(-1,sum(iv)),
main="A + B <=> C + D (D -> Ø)"
)
legend(
"topright",
legend=LETTERS[seq(4)],
lty=1,
col=c("red4","blue4","purple","green4")
)
matplot(
ex[[1]]$outputTimes,
t(y_ABC_D[[1]]$state[,,1]),
type="l",
xlab="time",
ylab="state variables",
lty=1,
col=c("red4","blue4","purple","green4"),
ylim=c(-1,sum(iv)),
main="A + B <=> C (D -> Ø)"
)
legend(
"topright",
legend=LETTERS[seq(4)],
lty=1,
col=c("red4","blue4","purple","green4")
)
The dynamics changed correctly.